This module will develop according to the following step-by-step learning path:
- illustration of a robotic cell and calibration check;
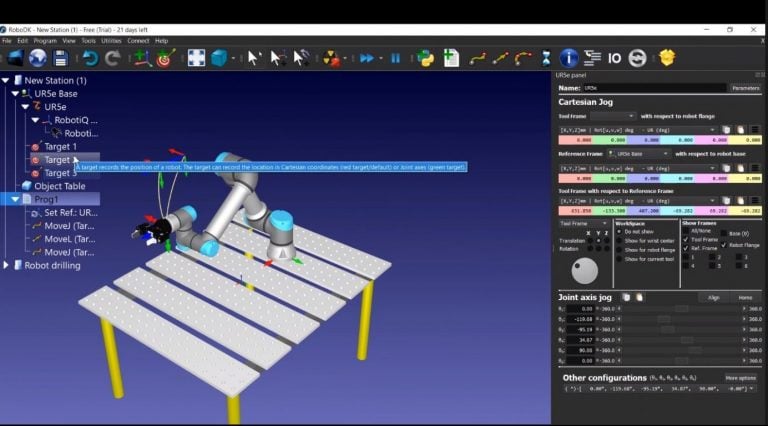
- brief illustration of simulation software;
- robot arm movement;
- preliminary operations for the execution of a movement program;
- creation of a very simple movement program;
- learner’s exercise in pairs for the realization of the movement program.